Sistemi d'Arma Nike - 11. L'Area di Controllo (IFC)
 L’Area Controllo del sistema d’arma Nike Hercules o RCDC (Radar Course
Directing Central) o IFC (Integrated Fire Control), era il centro di
comando e controllo del Sistema Nike. Lo scopo dell’Area Controllo era
di scoprire, identificare ed inseguire obiettivi volanti e di guidare il
missile all’intercettazione e distruzione di obiettivi ostili.
L’attività di comando e controllo era svolta, di norma, integrata con la
catena di difesa aerea, ma l’unità poteva operare anche in modo
autonomo. L’IFC era in grado di scoprire un bersaglio fino a 225 km con
il radar di acquisizione LOPAR (Low Power Acquisition Radar) e di
inseguire i bersagli fino a 180 km attraverso il radar TTR (Target
Tracking Radar). Il radar di acquisizione era dotato di dispositivi AJD
(Anti Jamming Devices) che gli permettevano di operare in ambiente
disturbato elettronicamente. L’IFC era in grado di portare a termine due
tipi di missione: la missione superficie-aria e la missione
superficie-superficie. Dal punto di vista strutturale l’Area Controllo
era composta da due infrastrutture principali, l’intervano e la sala
generatori, una piazzola o terrapieno radar. Nell’intervano si aprivano
gli shelter BCV (Battery Control Van), RCV (Radar Control Van),
Maintenance, e Simulatore T1. Accanto all’intervano era montato il
traliccio dell’antenna IFF, che fino alla metà degli anni ’80 era
montata direttamente sull’antenna del radar di acquisizione. Nella Sala
generatori erano alloggiati i gruppi elettrogeni originali Stewart
Stevenson, poi sostituiti dal gruppo elettrogeno Toro e il convertitore
50/400 Hz per assicurare le operazioni con la linea elettrica
commerciale. Sul terrapieno radar erano sistemati in linea orizzontale
il radar di acquisizione (LOPAR), il radar di inseguimento bersaglio (TTR),
il radar di inseguimento missile (MTR). Accanto al TTR era posizionato
il radar di inseguimento in distanza (TRR) per le operazione in ambiente
di disturbo elettronico. Ortogonalmente alla linea dei radar, ad una
distanza di circa 150 metri, era sistemato il RTSG (Radar Test Set
Group) composto da un antenna e da un apparato di controllo.
Sull’intervano erano sistemate le antenne radio delle linee Technical e
Command per le comunicazioni via radio con l’Area di Lancio. Le
comunicazioni via filo con l’Area di Lancio erano assicurate da un cavo
interarea attestato nel BCV. Fino alla fine degli anni ’60 c’era un
altro shelter montato su rimorchio ruotato che alloggiava il CDG
sostituito poi dall’apparato BTE (Battery Terminal Equipment) installato
direttamente all’interno del BCV.
L’Area Controllo del sistema d’arma Nike Hercules o RCDC (Radar Course
Directing Central) o IFC (Integrated Fire Control), era il centro di
comando e controllo del Sistema Nike. Lo scopo dell’Area Controllo era
di scoprire, identificare ed inseguire obiettivi volanti e di guidare il
missile all’intercettazione e distruzione di obiettivi ostili.
L’attività di comando e controllo era svolta, di norma, integrata con la
catena di difesa aerea, ma l’unità poteva operare anche in modo
autonomo. L’IFC era in grado di scoprire un bersaglio fino a 225 km con
il radar di acquisizione LOPAR (Low Power Acquisition Radar) e di
inseguire i bersagli fino a 180 km attraverso il radar TTR (Target
Tracking Radar). Il radar di acquisizione era dotato di dispositivi AJD
(Anti Jamming Devices) che gli permettevano di operare in ambiente
disturbato elettronicamente. L’IFC era in grado di portare a termine due
tipi di missione: la missione superficie-aria e la missione
superficie-superficie. Dal punto di vista strutturale l’Area Controllo
era composta da due infrastrutture principali, l’intervano e la sala
generatori, una piazzola o terrapieno radar. Nell’intervano si aprivano
gli shelter BCV (Battery Control Van), RCV (Radar Control Van),
Maintenance, e Simulatore T1. Accanto all’intervano era montato il
traliccio dell’antenna IFF, che fino alla metà degli anni ’80 era
montata direttamente sull’antenna del radar di acquisizione. Nella Sala
generatori erano alloggiati i gruppi elettrogeni originali Stewart
Stevenson, poi sostituiti dal gruppo elettrogeno Toro e il convertitore
50/400 Hz per assicurare le operazioni con la linea elettrica
commerciale. Sul terrapieno radar erano sistemati in linea orizzontale
il radar di acquisizione (LOPAR), il radar di inseguimento bersaglio (TTR),
il radar di inseguimento missile (MTR). Accanto al TTR era posizionato
il radar di inseguimento in distanza (TRR) per le operazione in ambiente
di disturbo elettronico. Ortogonalmente alla linea dei radar, ad una
distanza di circa 150 metri, era sistemato il RTSG (Radar Test Set
Group) composto da un antenna e da un apparato di controllo.
Sull’intervano erano sistemate le antenne radio delle linee Technical e
Command per le comunicazioni via radio con l’Area di Lancio. Le
comunicazioni via filo con l’Area di Lancio erano assicurate da un cavo
interarea attestato nel BCV. Fino alla fine degli anni ’60 c’era un
altro shelter montato su rimorchio ruotato che alloggiava il CDG
sostituito poi dall’apparato BTE (Battery Terminal Equipment) installato
direttamente all’interno del BCV.
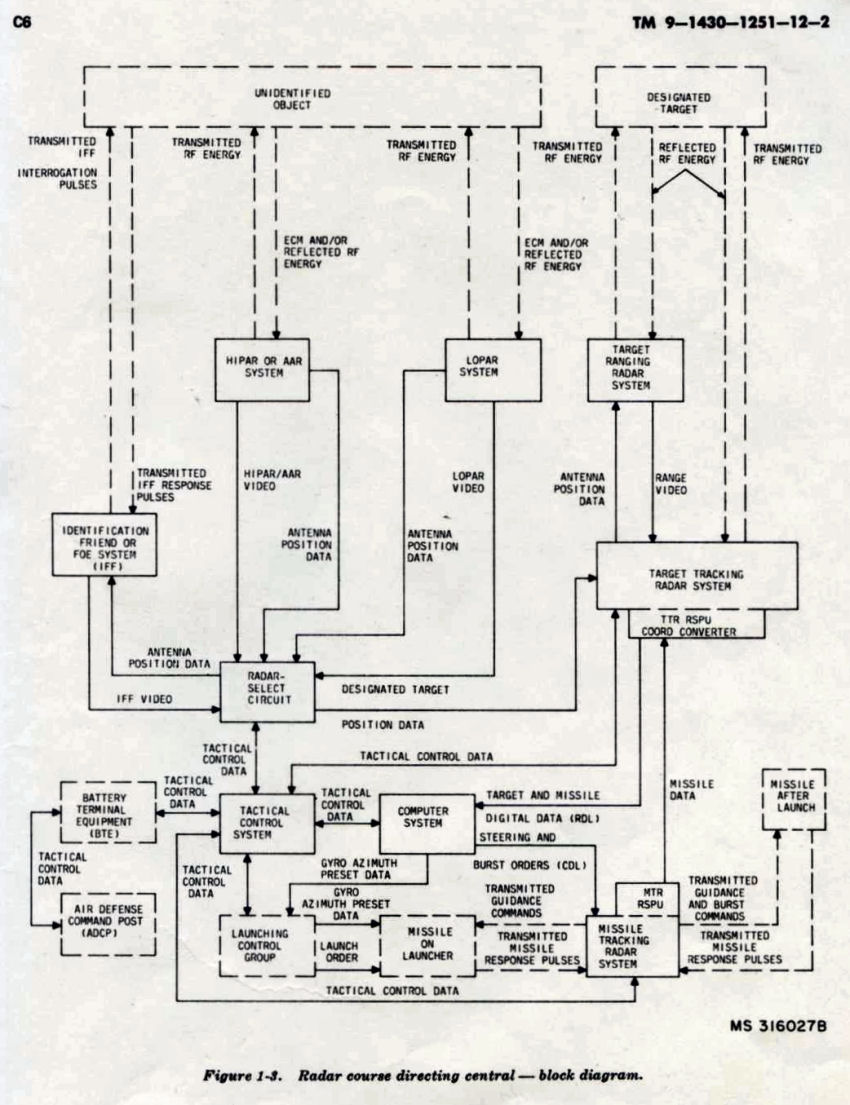
Il radar di acquisizione trasmette impulsi a radiofrequenza di alta potenza attraverso un antenna fortemente direzionale. Qualsiasi oggetto volante (velivolo o missile) che si trova nel fascio di radiazione del radar riflette parte di questa energia che viene captata dal sistema ricevente del radar LOPAR. Questa energia viene convertita in segnale video (Acquisition Video). Se l’oggetto non identificato emette rumore elettronico (noise) o segnale di disturbo in onda continua (CW), il sistema di contromisure elettroniche (ECCM) del radar di acquisizione provvede a ridurne gli effetti e a fornire un indicazione dell’azimuth (direzione di provenienza) del disturbatore. L’identificazione dell’obiettivo è conseguita con l’apparato IFF (Identification Friend or Foe) oppure attraverso dei dati ricevuti dal centro della difesa aerea superiore. Il radar di acquisizione dispone infatti di un apparato IFF che invia impulsi di interrogazione ai quali dovrebbero replicare i transponder IFF montati a bordo dei velivoli militari e civili. L’IFF riceve i segnali di risposta e li converte in segnali video, che mescolati con gli echi video del radar LOPAR vengono presentati al sistema di controllo tattico per la valutazione. Al sistema di controllo tattico possono giungere anche segnali e informazioni dalla catena della difesa aerea sempre al fine di valutare la identità e la posizione del bersaglio. Se il bersaglio è identificato come ostile, il radar di acquisizione trasferisce elettronicamente i dati di distanza e di azimuth al radar di inseguimento bersaglio (TTR). Tutti i bersagli presenti nell’area di copertura del radar di acquisizione sono presentati su un display tipo PPI (Plan Position Indicator).
|
|
|
72^ Squadriglia IT - Area Controllo - Intervano |
Il BTE (Battery Terminal Equipment) o FUIF, coordina ed integra le azioni effettuate da diverse batterie di difesa aerea. Questo apparato (prima del BTE questa funzione veniva svolta dal CDG), trasmette diversi segnali e informazioni sullo stato degli equipaggiamenti e sulle operazioni di ingaggio al livello superiore della catena di difesa aerea, e trasmette anche le informazioni sulla posizione dei bersagli da ingaggiare verso il livello superiore e alle altre batterie integrate. A sua volta, il BTE o FUIF riceve le informazioni dall’alto sull’identità dei bersagli e le coordinate di tutti i bersagli designati dalla catena della difesa aerea. Nel caso non fosse stato possibile comunicare con i livelli superiori, le diverse batterie integrate entravano nel modo di operazione “Round Robin”che consentiva lo scambio di informazioni tra batterie. Una parte delle informazioni tattiche e di quelle relative ai bersagli venivano mostrate sul PPI con una simbologia dedicata. Il resto delle informazioni era mostrato sul pannello “fire control-indicator” dotato di indicatori luminosi. I dati di posizione del bersaglio (azimuth e distanza) inviati dal LOPAR al radar di inseguimento bersaglio TTR servono per posizionare automaticamente l’antenna di quest’ultimo sulle coordinate dell’obiettivo e per portare il sistema di distanza del radar sulla distanza del bersaglio. Il radar TTR è di tipo impulsivo ed è dotato di un fascio di irradiazione molto stretto di tipo cilindrico (pencil beam). Una volta posizionato in azimuth e in distanza, l’operatore all’elevazione del TTR provvedeva a muovere in elevazione l’antenna fino a centrare il bersaglio nel fascio radar. A questo punto l’energia RF riflessa dal bersaglio era ricevuta dal sistema ricevitore del TTR e mostrata con segnali video su tre indicatori. Con questa presentazione, i tre operatori erano in grado di inseguire il bersaglio. Durante l’inseguimento del bersaglio il TTR inviava continuamente i dati di posizione al computer del sistema. In presenza di contromisure elettroniche nemiche per disturbare il radar TTR, veniva impiegato il radar di distanza TRR. L’antenna del TRR era asservita, in azimuth ed elevazione al sistema di posizionamento del TTR. Il radar TRR era in grado di fornire l’informazione di distanza, che era mostrata sull’indicatore di distanza del TTR e poteva essere utilizzata per continuare l’inseguimento in distanza.
Il missile viene agganciato automaticamente dal radar di inseguimento missile (MTR) che riceve i segnali di risposta trasmessi dal missile stesso quando è ancora sulla rampa di lancio e dopo il lancio. Da questi segnali il radar MTR estrae continuamente le informazioni di posizione del missile che invia al computer del sistema senza soluzione di continuità, e trasmette al missile gli ordini di guida e l’ordine di scoppio elaborati dal computer. Il computer calcola il punto di intercettazione previsto e il tempo all’intercettazione dai dati di posizione che gli vengono forniti in continuazione dai radar TTR e MTR. Queste informazioni sono mostrate e registrate in forma grafica sui plotter orizzontali e verticali, e visualizzati sul pannello di controllo tattico (Tactical control indicator display panel). Il TCO usa queste informazioni per determinare il momento ottimale per lanciare il missile. Prima del lancio, il computer invia segnali di preselezione al giroscopio di azimuth del missile per fornire un punto di riferimento per il missile. (Prima del lancio, sul missile il giroscopio azimutale si blocca sull’ultima informazione di posizione ricevuta e gli ordini di guida successivi sono riferiti a questa posizione). Dopo il lancio il computer continua a monitorare qualsiasi cambio nella posizione di volo del bersaglio e calcola ordini di guida correttivi per il missile. Ad un punto prestabilito, prima dell’intercettazione, il computer elabora un ordine di scoppio che deve essere inviato al missile.
|
|
![]()
WWW.QUELLIDEL72.IT